6.7 Other Issues
In this section, we will discuss a few miscellaneous issues related to deadlocks. These include two-phase locking, nonresource deadlocks, and starvation.
6.7.1 Two-Phase Locking
Although both avoidance and prevention are not terribly promising in the general case, for specific applications, many excellent special-purpose algorithms are known. As an example, in many database systems, an operation that occurs frequently is requesting locks on several records and then updating all the locked records. When multiple processes are running at the same time, there is a real danger of deadlock.
The approach often used is called two-phase locking. In the first phase, the process tries to lock all the records it needs, one at a time. If it succeeds, it begins the second phase, performing its updates and releasing the locks. No real work is done in the first phase.
If during the first phase some record is needed that is already locked, the process just releases all its locks, waits a bit, and starts the first phase all over. In a certain sense, this approach is similar to requesting all the resources needed in advance, or at least before anything irreversible is done. In some versions of twophase locking, there is no release and restart if a locked record is encountered during the first phase. In these versions, deadlock can occur.
However, this strategy is not applicable in general. In real-time systems and process control systems, for example, it is not acceptable to just terminate a process partway through because a resource is not available and start all over again. Neither is it acceptable to start over if the process has read or written messages to the network, updated files, or anything else that cannot be safely repeated. The algorithm works only in those situations where the programmer has very carefully arranged things so that the program can be stopped at any point during the first phase and restarted. Many applications cannot be structured this way.
6.7.2 Communication Deadlocks
All of our work so far has concentrated on resource deadlocks. One process wants something that another process has and must wait until the first one gives it up. Sometimes the resources are hardware or software objects, such as cameras or database records, but sometimes they are more abstract. Resource deadlock is a problem of competition synchronization. Independent processes would complete service if their execution were not interleaved with competing processes. A process locks resources in order to prevent inconsistent resource states caused by interleaved access to resources. Interleaved access to locked resources, however, enables resource deadlock. In Fig. 6-5, we saw a resource deadlock where the resources were semaphores. A semaphore is a bit more abstract than a camera, but in this example, each process successfully acquired a resource (one of the semaphores) and deadlocked trying to acquire another one (the other semaphore). This situation is a classical resource deadlock.
However, as we mentioned at the start of the chapter, while resource deadlocks are the most common kind, they are not the only kind. Another kind of deadlock can occur in communication systems (e.g., networks), in which two or more processes communicate by sending messages. A common arrangement is that process A sends a request message to process B, and then blocks until B sends back a reply message. Suppose that the request message gets lost. A is blocked waiting for the reply. B is blocked waiting for a request asking it to do something. We have a deadlock.
This, though, is not the classical resource deadlock. A does not have possession of some resource B wants, and vice versa. In fact, there are no resources at all in sight. But it is a deadlock according to our formal definition since we have a set of (two) processes, each blocked waiting for an event only the other one can cause. This situation is called a communication deadlock to contrast it with the more common resource deadlock. Communication deadlock is an anomaly of cooperation synchronization. The processes in this type of deadlock could not complete service if executed independently.
Communication deadlocks cannot be prevented by ordering the resources (since there are no resources) or avoided by careful scheduling (since there are no moments when a request could be postponed). Luckily, there is another technique that can usually be employed to break communication deadlocks: timeouts. In most network communication systems, whenever a message is sent to which a reply is expected, a timer is started. If the timer goes off before the reply arrives, the sender of the message assumes that the message has been lost and sends it again (and again and again if needed). In this way, the deadlock is broken. Phrased differently, the timeout serves as a heuristic to detect deadlocks and enables recovery. This heuristic is applicable to resource deadlocks also and is relied upon by users with buggy device drivers that can deadlock and freeze the system.
Of course, if the original message was not lost but the reply was simply delayed, the intended recipient may get the message two or more times, possibly with undesirable consequences. Think about an electronic banking system in which the message contains instructions to make a payment. Clearly, that should not be repeated (and executed) multiple times just because the network is slow or the timeout too short. Designing the communication rules, called the protocol, to get everything right is a complex subject, but one far beyond the scope of this book. Readers interested in network protocols might be interested in another book by one of the authors, Computer Networks (Tanenbaum et al., 2020).
Not all deadlocks occurring in communication systems or networks are communication deadlocks. Resource deadlocks can also occur there. Consider, for example, the network of Fig. 6-18. It is a simplified view of the Internet. Very simplified. The Internet consists of two kinds of computers: hosts and routers. A host is a user computer, either someone’s tablet or PC at home, a PC at a company, or a corporate server. Hosts do work for people. A router is a specialized communications computer that moves packets of data from the source to the destination. Each host is connected to one or more routers, either by a digital subscriber line, cable TV connection, LAN, dial-up line, wireless network, optical fiber, or something else.
Figure 6-18
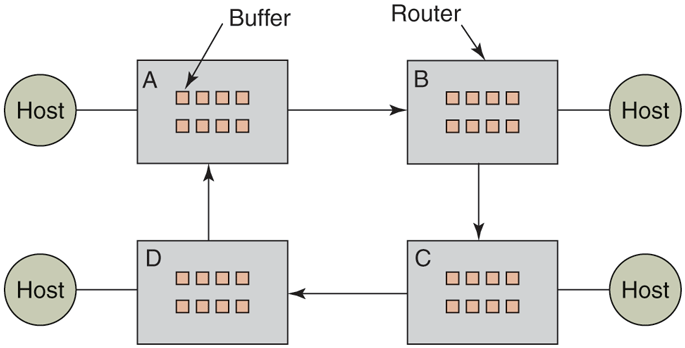
A resource deadlock in a network.
When a packet comes into a router from one of its hosts, it is put into a buffer for subsequent transmission to another router and then to another until it gets to the destination. These buffers are resources and there are a finite number of them. In Fig. 6-19, each router has only eight buffers (in practice they have millions, but that does not change the nature of the potential deadlock, just its frequency). Suppose that all the packets at router A need to go to B and all the packets at B need to go to C and all the packets at C need to go to D and all the packets at D need to go to A. No packet can move because there is no buffer at the other end and we have a classical resource deadlock, albeit in the middle of a communications system.
Figure 6-19
Polite processes that may cause livelock.
6.7.3 Livelock
In some situations, a process tries to be polite by giving up the locks it already acquired whenever it notices that it cannot obtain the next lock it needs. Then it waits a millisecond, say, and tries again. In principle, this is good and should help to detect and avoid deadlock. However, if the other process does the same thing at exactly the same time, they will be in the situation of two people trying to pass each other on the street when both of them politely step aside, and yet no progress is possible, because they keep stepping the same way at the same time.
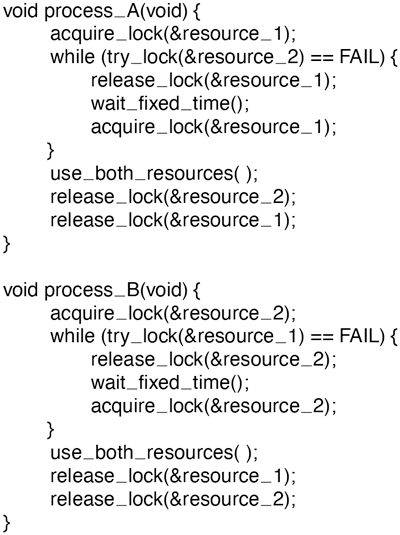
Consider an atomic primitive try_lock in which the calling process tests a mutex and either grabs it or returns failure. In other words, it never blocks. Programmers can use it together with acquire_lock which also tries to grab the lock, but blocks if the lock is not currently available. Now imagine a pair of processes running in parallel (perhaps on different cores) that use two resources, as shown in Fig. 6-19. Each one needs two resources and uses the try_lock primitive to try to acquire the necessary locks. If the attempt fails, the process gives up the lock it holds and tries again. In Fig. 6-19, process A runs and acquires resource 1, while process 2 runs and acquires resource 2. Next, they try to acquire the other lock and fail. To be polite, they give up the lock they are currently holding and try again. This procedure repeats until a bored user (or some other entity) puts one of these processes out of its misery. Clearly, no process is blocked and we could even say that things are happening, so this is not a deadlock. Still, no progress is possible, so we do have something equivalent: a livelock.
Livelock and deadlock can occur in surprising ways. In some systems, the total number of processes allowed is determined by the number of entries in the process table. Thus, process-table slots are finite resources. If a fork fails because the table is full, a reasonable approach for the program doing the fork is to wait a random time and try again.
Now suppose that a UNIX system has 100 process slots. Ten programs are running, each of which needs to create 12 children. After each process has created 9 processes, the 10 original processes and the 90 new processes have exhausted the table. Each of the 10 original processes now sits in an endless loop forking and failing—a livelock. The probability of this happening is minuscule, but it could happen. Should we abandon processes and the fork call to eliminate the problem?
The maximum number of open files is similarly restricted by the size of the inode table, so a similar problem occurs when it fills up. Swap space on the disk is another limited resource. In fact, almost every table in the operating system represents a finite resource. Should we abolish all of these because it might happen that a collection of n processes might each claim of the total, and then each try to claim another one? Probably not a good idea.
Most operating systems, including UNIX and Windows, basically just ignore the problem on the assumption that most users would prefer an occasional livelock (or even deadlock) to a rule restricting all users to one process, one open file, and one of everything. If these problems could be eliminated for free, there would not be much discussion. The problem is that the price is high, mostly in terms of putting inconvenient restrictions on processes. Thus, we are faced with an unpleasant trade-off between convenience and correctness, and a great deal of discussion about which is more important, and to whom.
6.7.4 Starvation
We already saw that a problem closely related to deadlock and livelock is starvation. In a dynamic system, requests for resources happen all the time. Some policy is needed to make a decision about who gets which resource when. This policy, although seemingly reasonable, may lead to some processes never getting service even though they are not deadlocked.
As an example, consider allocation of the printer. Imagine that the system uses some algorithm to ensure that allocating the printer does not lead to deadlock. Now suppose that several processes all want it at once. Who should get it?
One possible allocation algorithm is to give it to the process with the smallest file to print (assuming this information is available). This approach maximizes the number of happy customers and seems fair. Now consider what happens in a busy system when one process has a huge file to print. Every time the printer is free, the system will look around and choose the process with the shortest file. If there is a constant stream of processes with short files, the process with the huge file will never be allocated the printer. It will simply starve to death (be postponed indefinitely, even though it is not blocked).
Starvation can be avoided by using a first-come, first-served resource allocation policy. With this approach, the process waiting the longest gets served next. In due course of time, any given process will eventually become the oldest and thus get the needed resource.
It is worth mentioning that some people do not make a distinction between starvation and deadlock because in both cases there is no forward progress. Others feel that they are fundamentally different because a process could easily be programmed to try to do something n times and, if all of them failed, try something else. A blocked process does not have that choice.