2.3 Event-Driven Servers
In the previous section, we have seen two possible designs for a Web server: a fast multithreaded one and a slow single-threaded one. Suppose that threads are not available or not desirable but the system designers find the performance loss due to single threading, as described so far, unacceptable. If nonblocking versions of system calls, such as read, are available, a third approach is possible. When a request comes in, the one and only thread examines it. If it can be satisfied from the cache, fine, but if not, a nonblocking disk operation is started.
The server records the state of the current request in a table and then goes and gets the next event. The next event may either be a request for new work or a reply from the disk about a previous operation. If it is new work, that work is started. If it is a reply from the disk, the relevant information is fetched from the table and the reply processed. With nonblocking disk I/O, a reply probably will have to take the form of a signal or interrupt.
In this design, the ‘‘sequential process’’ model that we had in the first two cases is lost. The state of the computation must be explicitly saved and restored in the table every time the server switches from working on one request to another. In effect, we are simulating the threads and their stacks the hard way. A design like this, in which each computation has a saved state, and there exists some set of events that can occur to change the state, is called a finite-state machine. This concept is widely used throughout computer science.
In fact, it is very popular in high-throughput servers where even threads are considered too expensive and instead an event-driven programming paradigm is used. By implementing the server as a finite state machine that responds to events (e.g., the availability of data on a socket) and interacting with the operating system using non-blocking (or asynchronous) system calls, the implementation can be very efficient. Every event leads to a burst of activity, but it never blocks.
Fig. 2-19 shows a pseudo-code example of an event-driven thank-you server (the server thanks every client that sends it a message) that uses the select call to monitor multiple network connections (line 17). The select determines which file descriptors are ready for receiving or sending data and, looping over them, receives all the messages it can and then tries to send thank-you messages on all corresponding connections that are ready to receive data. In case the server could not send the full thank you message, it remembers which bytes it still needs to send, so it can try again later, when there is more space available. We simplified the program to keep it relatively short, by means of pseudo code and not worrying about errors or connections closing. Nevertheless, it illustrates that a single-threaded event-driven server can handle many clients concurrently.
Figure 2-19
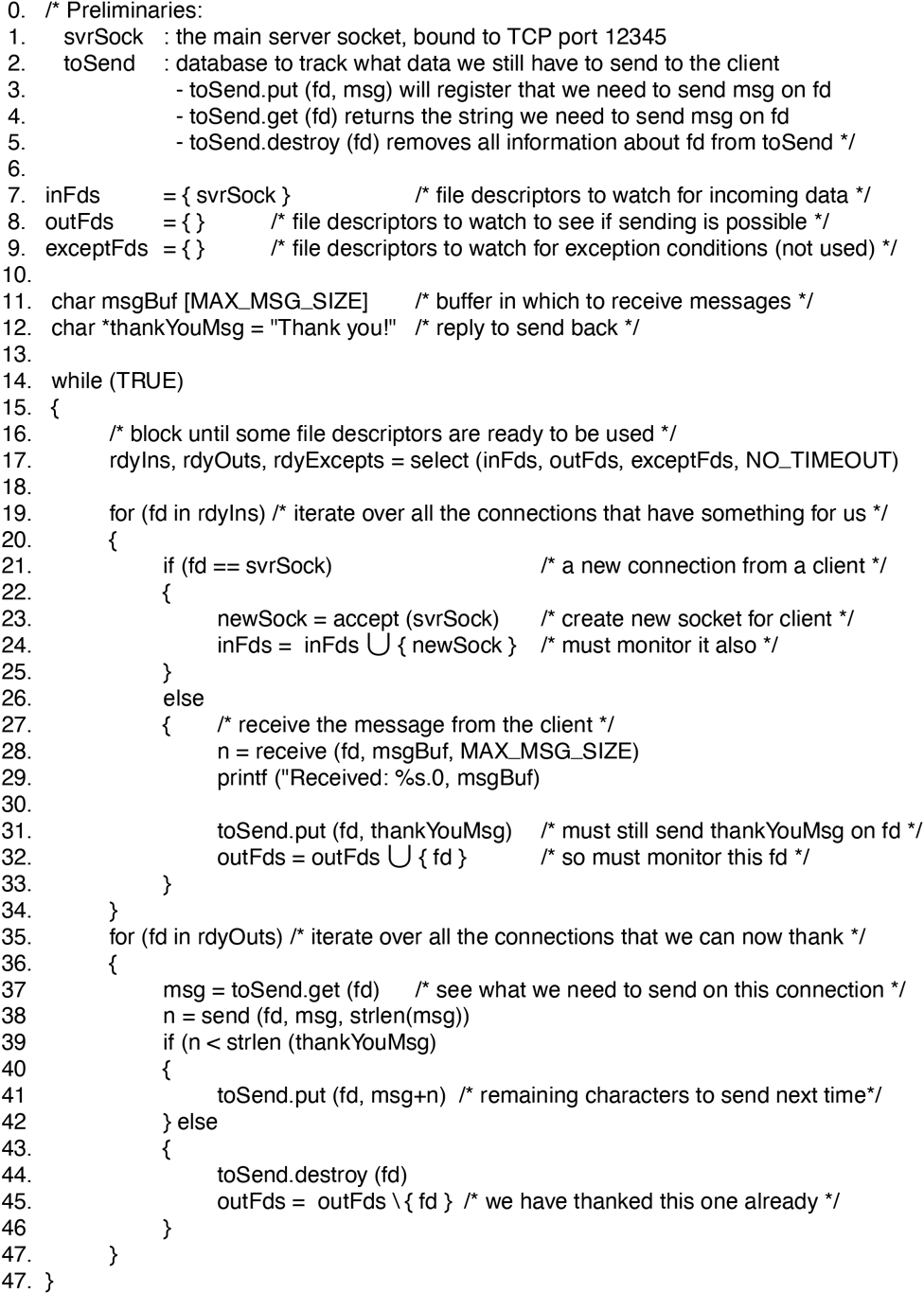
An event-driven thank-you server (pseudo code).
Most popular operating systems offer special, highly optimized event notification interfaces for asynchronous I/O that are much more efficient than select. Well-known examples include the epoll system call on Linux, and the similar kqueue interface on FreeBSD. Windows and Solaris have slightly different solutions. They all allow the server to monitor many network connections at once without blocking on any of them. Because of this Web servers such as nginx can comfortably handle ten thousand concurrent connections. This is no trivial feat and even has its own name: the C10k problem.
Single-Threaded Versus Multi-Threaded Versus Event-driven Servers
Finally, let us compare the three different ways to build a server. It should now be clear what threads have to offer. They make it possible to retain the idea of sequential processes that make blocking calls (e.g., for disk I/O) and still achieve parallelism. Blocking system calls make programming easier, and parallelism improves performance. The single-threaded server retains the simplicity of blocking system calls but gives up performance.
The third approach, event-driven programming, also achieves high performance through parallelism but uses nonblocking calls and interrupts to do so. It is considered harder to program. These models are summarized in Fig. 2-20.
Figure 2-20
| Model | Characteristics |
|---|---|
| Threads | Parallelism, blocking system calls |
| Single-threaded process | No parallelism, blocking system calls |
| Finite-state machine/event-driven | Parallelism, nonblocking system calls, interrupts |
Three ways to construct a server.
These three approaches to handle requests from a client apply not only to user programs, but also to the kernel itself where concurrency is just as important for performance. In fact, this is a good moment to point out that this book introduces many operating system concepts with an emphasis on what they mean for user programs, but of course the operating system itself uses these concepts internally also (and some are even more relevant to the operating system than to user programs). Thus, the operating system kernel itself may consist of multithreaded or eventdriven software. For instance, the Linux kernel on modern Intel CPUs is a multithreaded operating system kernel. In contrast, MINIX 3 consists of many servers implemented following the model of finite state machine and events.